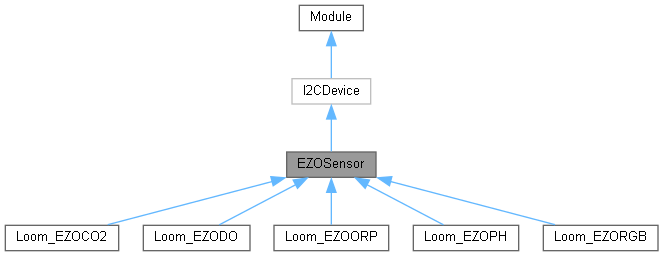
Inheritance diagram for EZOSensor:
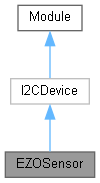
Collaboration diagram for EZOSensor:
Public Member Functions | |
| EZOSensor (const char *modName) | |
| bool | sendTransmission (const char *command) |
| bool | calibrate () |
| bool | readSensor (int waitTime) |
| const char * | getSensorData () |
 Public Member Functions inherited from I2CDevice Public Member Functions inherited from I2CDevice | |
| I2CDevice (const char *modName) | |
| bool | checkDeviceConnection () |
| Public Member Functions inherited from Module | |
| Module (const char *modName) | |
| void | setModuleName (const char *modName) |
| virtual const char * | getModuleName () |
| virtual void | printModuleName (const char *message) |
| virtual void | initialize ()=0 |
| virtual void | measure ()=0 |
| virtual void | package ()=0 |
| virtual void | power_up ()=0 |
| virtual void | power_down ()=0 |
| virtual void | display_data () |
Additional Inherited Members | |
| Public Attributes inherited from I2CDevice | |
| bool | needsReinit = false |
| Public Attributes inherited from Module | |
| bool | moduleInitialized = true |
| int | module_address = -1 |
Member Function Documentation
◆ readSensor()
|
inline |
Request and read in data from the senor
- Parameters
-
waitTime This is the length of time we will wait between requesting a read and actually reading the data
- Returns
- Whether or not the read was successfully
The documentation for this class was generated from the following file:
- C:/Users/jwilt/AppData/Local/Arduino15/packages/loom4/hardware/samd/4.5/libraries/Loom/src/Sensors/I2C/EZO/EZOSensor.h